通过控制施加在电机线圈上的电脉冲顺序、频率和数量,可以实现对步进电机的转向、速度和旋转角度的控制。配合以直线运动执行机构或齿轮箱装置,更可以实现更加复杂、精密的线性运动控制要求。步进电机一般由前后端盖、轴承、中心轴、转子铁芯、定子铁芯、定子组件、波纹垫圈、螺钉等部分构成,步进电机也叫步进器,它利用电磁学原理,将电能转换为机械能,是由缠绕在电机定子齿槽上的线圈驱动的。通常情况下,一根绕成圈状的金属丝叫做螺线管,而在电机中,绕在定子齿槽上的金属丝则叫做绕组、线圈、或相。
步进电机驱动器根据外来的控制脉冲和方向信号,通过其内部的逻辑电路,控制步进电机的绕组以一定的时序正向或反向通电,使得电机正向/反向旋转,或者锁定。
以1.8度两相步进电机为例:当两相绕组都通电励磁时,电机输出轴将静止并锁定位置。在额定电流下使电机保持锁定的最大力矩为保持力矩。如果其中一相绕组的电流发生了变向,则电机将顺着一个既定方向旋转一步(1.8度)。同理,如果是另外一项绕 组的电流发生了变向,则电机将顺着与前者相反的方向旋转一步(1.8度)。当通过线圈绕组的电流按顺序依次变向励磁时,则电 机会顺着既定的方向实现连续旋转步进,运行精度非常高。对于1.8度两相步进电机旋转一周需200步。
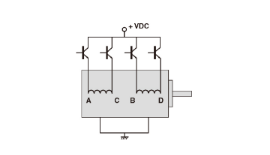
两相步进电机有两种绕组形式:双极性和单极性。双极性电机每相上只有一个绕组线圈,电机连续旋转时电流要在同一线圈内依次变向励磁,驱动电路设计上需要八个电子开关进行顺序切换。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
标签:
步进电机