1引言
直流伺服电机具有响应快、低速平稳性好、调速范围宽等特点,因而常常用于实现精密调速和位置控制的随动系统中,在工业、国防和民用等领域内得到广泛应用,特别是在火炮稳定系统、舰载平台、雷达天线、机器人控制等场合。尽管交流伺服电机的发展相当迅速,但在这些领域内还难以取代直流伺服电机。
传统的直流调速系统包含2个反馈环路,即速度环和电流环,采用测速机、电流传感器(霍尔器件)及模拟电子线路实现速度的闭环控制。现代数字直流伺服控制则采用高速数字信号处理器(DSP),直接对速度和电流信号进行采样,通过软件实现数字比较、数字调节运算(数字滤波)、数字脉宽调制等各种功能,从而实现对速度的精确控制。二者相比,模拟调速系统结构简单、成本低、可靠性高,但调试较复杂,因为其电路参数的修改往往需要硬件上的改动;而数字调速系统结构复杂、成本高,但是调速精度很高、调试过程也较容易,调速系统的性能可以由软件进行控制。
本文介绍一种方法,介于模拟调速及数字调速二者之间,即采用可编程模拟器件(ispPAC10)实现模拟调速系统,系统的电路参数可以通过软件进行调整,并且可以对建立的系统模型进行仿真。采用这种方法对原有的直流调速器一种CCD相机的自动变焦系统进行改进,取得了很好的效果。
2模拟直流调速系统的组成和工作原理
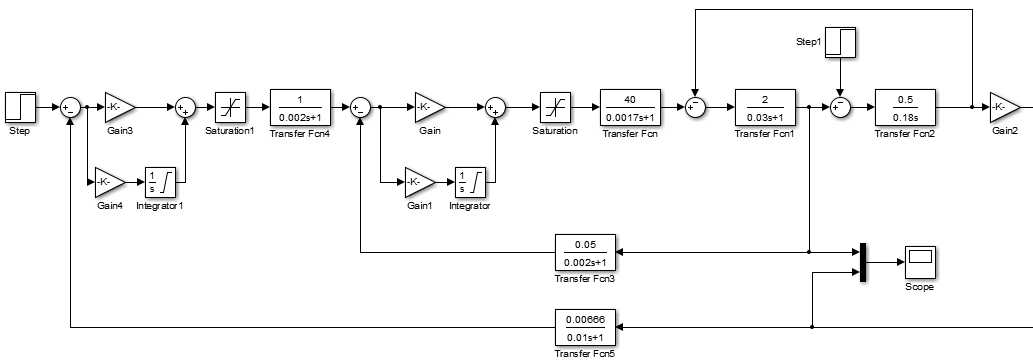
模拟调速系统一般是由2个闭环构成的,既速度闭环和电流闭环,为使二者能够相互协调、发挥作用,在系统中设置了2个调节器,分别调节转速和电流。2个反馈闭环在结构上采用一环套一环的嵌套结构,这就是所谓的双闭环调速系统,他具有动态响应快、抗干扰能力强等优点,因而得到广泛地应用。图1是系统的结构框图,其中ASR,ACR分别是速度和电流调节器,通常是由模拟运放构成PI或PID电路;信号调理主要是对反馈信号进行滤波、放大。考虑到直流电机的数学模型,模拟调速系统动态传递函数关系如图2所示。
在模拟调速系统的调试过程中,因电机的参数或负载的机械特性与理论值有较大差异,往往需要频繁更换R,C等元件来改变电路参数,以获得预期的动态性能指标,这样做起来非常麻烦,如果采用可编程模拟器件构成调节器电路,系统参数如增益、带宽甚至电路结构都可以通过软件进行修改,调试起来就非常方便了。下面以图3所示PI调节器为例,说明如何应用可编程模拟器件-ispQAC10实现模拟调节器电路。
3实现方法
3.1ispPAC10简介
ispPAC10是Lattice公司生产的一种在系统可编程模拟器件,采用非易失性E2CMOS工艺,其内部的模拟部件块“PACblocks”无需外接电阻、电容等元件,便可代替传统的模拟电路,如运算放大器、滤波器等;通过软件编程,可实现电路的设计和修改,极大地缩短了开发、调试周期,具有很高的性能价格比。Lattice公司为开发ispPAC10而提供的集成软件包PACDesigner功能强大、易学易用,可以在网上下载。ispPAC10内部包含4个模拟部件块-内部结构如图5所示。
通过式(4)、式(5)以及图6(b),可以看出PACblock模块具有比例、求和、积分、滤波等基本运算功能,而1片ispPAC10包含4个PACblock模块,每个模块都有2组差动输入、1路差动输出。
将这4部分适当地连接,便可形成较复杂的模拟电路。
3.2ispPAC10实现调节器电路
以图(3)所示具体电路为例,设R0=10kΩ,C0=0.15μF,Rf=40kΩ,Cf=0.5μF,其传递函数如图7所示
现在可以用ispPAC10直接实现上述调节器,具体电路如图9所示,其中运放的增益、电容的取值是通过软件PAC-Designer设定的。
4结语
用可编程模拟器件可以很方便地设计、实现模拟电路。用他设计模拟调速电路,电路的参数、结构都可以通过软件进行调整,使调试过程变得非常简单。需要注意的是这一类器件工作电压一般不超过5V,ispPAC10工作电压为+5V,因此输入信号不能太大,目前还只能用于小信号模拟电路中,尽管如此,其发展前景仍然非常诱人。
现在可以用ispPAC10直接实现上述调节器,具体电路如图9所示,其中运放的增益、电容的取值是通过软件PAC-Designer设定的。