工程师在设计任何类型的运动控制过程时可以做出的关键的决定之一就是选择电动机。无论是类型还是尺寸,要获得合适的电动机,对于最终机器的运行效率至关重要。此外,确保电机不会超出预算始终是最主要的问题。在做决定时,首先要回答的问题之一是:哪种类型的电机是最好的?应用程序需要高性能伺服电机吗?低成本的步进器会更好吗?或者也许还有第三个折中的选择可以考虑?
答案从特定应用程序的需求开始。在确定适合任何给定应用的电机类型之前,有许多因素要考虑。
需求
电机每分钟需要转多少圈?需要多少扭矩?需要的最高速度是多少?
这些关键问题不能简单地通过选择一个给定马力的发动机来解决。
电机的功率输出是转矩和速度的组合,可以通过速度、转矩和一个常数的乘积来计算。
然而,由于这种计算的性质,有许多不同的扭矩和速度组合将产生特定的功率输出。因此,不同的电机具有相似的额定功率可以不同的运行,由于它们提供的速度和扭矩的组合。
伺服电机通常具有高扭矩的小包装和分段叠层。
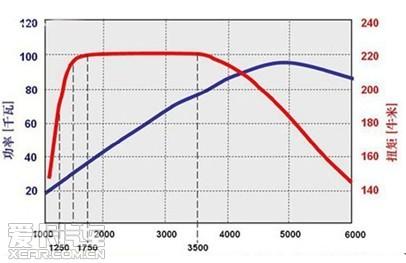
工程师必须知道一个特定大小的负载需要移动多快,然后才能自信地选择一个电机,将工作做到最好。所执行的工作也必须在电机的扭矩/速度曲线下。这条曲线显示了电机在运行过程中的转矩变化情况。使用“最坏情况”假设(换句话说,确定工作所需的最大/最小转矩和转速),工程师可以确信所选电机具有足够的转矩/转速曲线。
负载的惯性是另一个因素,应该在进入选择电机的决策过程之前解决。惯量比必须计算,即负载的惯量与电机的惯量的比较。一个经验法则是,如果负载的惯性超过转子的10倍,那么调整电机可能会更加困难,性能可能会受到影响。但这一规则不仅因技术而异,也因供应商而异,甚至因产品而异。应用程序的关键程度也会影响这个决定。一些产品处理高达30比1的比率,而直接驱动器运行高达200比1。许多人不喜欢调整一个超过10比1的比例的发动机。
最后,是否存在物理上的限制,将一个特定的马达限制在另一个马达上。电机有不同的形状和尺寸。在某些情况下,电动机又大又笨重,并且某些操作无法容纳一定尺寸的电动机。在做出最佳类型的电动机的明智决定之前,应认识并理解这些物理规格。
一旦工程师们回答了所有这些问题:速度、扭矩、马力、负载惯性和物理限制,他们就可以锁定最有效的尺寸的电机。然而,决策过程并没有止步于此。工程师还必须弄清楚哪种类型的电机最适合应用。多年来,对于大多数应用来说,对类型的选择归结为两个选择之一:伺服电机或开环步进电机。
伺服和步进
伺服和开环步进电机的工作原理相似。但是,在确定哪种电动机最适合给定应用之前,工程师必须了解两者之间的关键区别。
在传统伺服系统中,控制器通过脉冲和方向或与位置、速度或扭矩有关的模拟命令向电机驱动发送命令。一些控件可能使用基于总线的方法,在最新的控件中通常是基于以太网的通信方法。驱动器然后发送适当的电流到电机的每个阶段。电机反馈回电机的驱动器,如果需要,控制器。驱动器依靠这些信息来正确地对电机进行换向,并发送有关电机轴动态位置的良好信息。因此,伺服电机被认为是闭环电机,并包含内置编码器,位置数据经常被反馈给控制器。这个反馈给控制器更多的控制电机。如果某些东西没有按照它应该的方式运行,控制器可以在不同程度上对操作进行调整。这类关键信息是开环步进电机不能提供的好处。
步进电机也操作命令发送到电机的驱动器,以指示移动的距离和速度。通常,这个信号是一个步进和方向命令。然而,开环步进器不能向操作人员提供反馈,因此其控制不能正确评估情况,并作出调整,以改善电机的运行。
例如,如果电机的扭矩不足以处理负载,电机可能会停转或错过某些步骤。当这种情况发生时,目标位置不会被击中。考虑到步进电机的开环特性,这种不准确的定位将不能充分地反馈给控制器,因此控制器可以进行调整。
伺服电机似乎在效率和性能上都有明显的优势,那么为什么要选择步进电机呢?有几个原因。最常见的是价格;在做出任何设计决策时,运营预算都是重要的考虑因素。由于预算紧缩,必须决定削减不必要的开支。这不仅是指电机本身的成本,但常规和紧急维护往往更便宜的步进电机相对于伺服。因此,如果一个伺服电机的利益将不能证明其成本,一个标准的步进电机可能是足够的。
从纯操作的角度来看,步进电机明显比标准伺服电机更容易使用。操作步进电机更容易理解和配置。大多数人都会同意,如果没有理由让行动过于复杂,那就把事情简单化。
两种不同类型的电机提供的优势是非常不同的。伺服电机是理想的,如果你需要一个电机的速度超过3000转/分和高扭矩。然而,对于只要求几百rpm或更少的速度的应用程序,伺服电机并不总是最佳选择。伺服电机对于低速应用可能是过度的。
在低速应用中,步进电机是最好的解决方案。步进电机不仅可重复时,涉及停止,但也设计在低速运行,同时提供高扭矩。通过这种设计的本质,步进电机可以控制和运行到他们的速度限制。典型的步进电机的速度限制通常在1,000转/分以下,而伺服电机的额定转速可以达到3,000转/分甚至更高,有时甚至超过7,000转/分。
如果步进器的大小是正确的,它可以是完美的选择。然而,当步进电机在开环配置中运行时,如果出现问题,作业人员可能无法获得解决问题所需的所有数据。
解决开环问题
在过去的几十年里,有几种不同的方法提供了解决开环步进器的传统问题。一种方法是在通电时将电机定位到传感器,甚至在应用过程中多次定位。虽然很简单,但这会降低操作速度,并不能捕获正常操作过程中出现的问题。
另一种方法是添加反馈来检测电机是否停转或位置不正确。运动控制公司的工程师创造了“失速检测”和“位置维护”功能。甚至有一些方法更进一步,把步进电机模仿的很像伺服,甚至用花哨的算法模仿它们。
闭环步进电机提供了步进电机的所有优点:易于使用,简单,并能够在低速运行与准确的停止。此外,他们仍然提供反馈能力伺服电机做。幸运的是,它不需要伴随伺服最大的缺点:价格更贵。
关键一直在于开环步进电机的工作方式。它们通常有两个线圈,有时是五个,在它们之间有一个磁平衡装置。运动扰乱了这种平衡,导致电机轴电动落后,但操作员不知道落后多远。停止点对开环步进器是可重复的,但不是对所有负载。在步进器上放置编码器并使其成为一个闭环提供了一些动态控制。这使得操作人员可以在不同的负载下停留在特定的位置。
这些好处从使用闭环步进电机的某些应用急剧增加了这些电机在运动控制社区的普及。具体来说,在两个比较突出的行业,半导体和医疗设备制造商中,使用闭环步进电机的情况明显增加。这些行业的工程师必须确切地知道电机将负载或执行器定位在何处,无论它是驱动皮带还是滚珠丝杠。这些步进器的闭环反馈让他们知道它的确切位置。这些步进器也可以提供更好的性能比伺服在较低的速度。
通常,任何需要以比伺服电动机更低的成本来保证性能的应用,以及能够以较低速度运行的能力,都是闭环步进电动机的理想选择。
请记住,操作人员确实需要确保驱动或控制支持闭环步进电机。过去,你可以在步进器的背面安装编码器,但驱动器是标准的步进驱动器,不支持编码器。编码器需要被带回到控制器和位置验证将需要实现在一个给定的移动结束。这对于新的闭环步进驱动器是不需要的。闭环步进驱动可以动态自动处理位置和速度控制,不涉及控制器。
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。