研究人员开发了一种自动船舶路径跟踪性能的新方法
自动驾驶车辆的日益普及激发了海事行业的巨大研究兴趣,特别是开发海上自主水面船舶(MASS)。MASS的一个基本要求是能够遵循预先确定的海上路径,同时考虑障碍物、水深和船舶机动性。
由于恶劣天气条件而偏离该路径的任何行为都会带来严重的风险,例如碰撞、接触或搁浅事件。因此,自主船舶需要有一种有效防止偏差的机制。
然而,当前评估自主船舶路径跟踪性能的方法依赖于简化的数学船舶模型。不幸的是,这些模型无法捕捉船体、螺旋桨、舵和船舶外部负载之间的复杂相互作用,导致路径跟踪性能的估计不准确。
此外,为了响应国际海事组织减少温室气体排放的能源效率设计指数,海洋环境保护委员会提供了指导方针,以确定在恶劣天气条件下保持船舶机动性所需的最小推进功率。
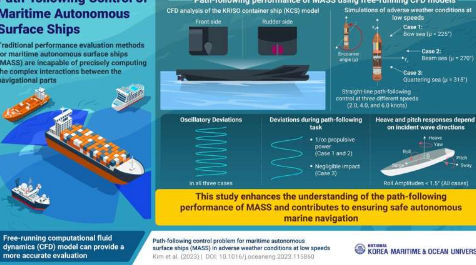
鉴于这些准则和评估路径跟踪性能的需要,由国立韩国海事海洋大学导航融合研究部助理教授DaejeongKim领导的一个跨国研究小组最近研究了路径跟踪使用自由运行的计算流体动力学(CFD)模型与视线(LOS)制导系统相结合,在恶劣天气条件下低速运行MASS的性能。
“我们采用了基于完全非线性非稳态雷诺平均纳维斯托克斯求解器的CFD模型,该模型可以结合粘性和湍流效应以及对路径跟踪问题至关重要的自由表面分辨率,从而能够更好地预测路径跟踪性能,”金博士。
他们的研究结果发表在《海洋工程》上。
该团队对带有自主LOS引导系统的流行KRISO集装箱船模型进行了基于CFD的分析。不利的天气条件被建模为来自船头、横梁和四分之一海浪的干扰,并在三种不同的速度下研究这三种情况,以确定前进速度对路径跟踪性能的影响。
模拟显示该船在所有三种情况下都经历了振荡偏差。在弓波和束波的情况下,这些偏差随着推进功率的增加而减小。有趣的是,在四分之一波的情况下,推进功率对偏差的影响可以忽略不计。
此外,船舶的升沉和纵摇响应很大程度上受到入射波方向的影响。此外,在所有三种情况下,滚动幅度始终低于1.5度。然而,该团队无法确定提高速度对改善路径跟踪性能的有效性。
Kim博士在详细阐述这些发现的意义时表示:“所提出的基于CFD的模型可以为增强自主海上导航的安全性做出宝贵贡献。此外,它还可以为模型规模自由导航提供低成本替代方案。”进行实验或全面的海上试验。”
总之,这项研究为分析MASS在恶劣天气条件下低速路径跟踪性能奠定了基础,有助于确保更安全的自主海上导航。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
截至2024年,大众探岳GTE的售价可能会因地区、配置和促销活动而有所不同。一般来说,2024款探岳GTE的价格可能...浏览全文>>
-
关于2025款途观L的价格信息,目前还没有官方发布。不过,根据以往的市场规律和车型更新周期,我们可以大致推测...浏览全文>>
-
根据您提供的信息,2024款广东东莞威然的最低售价为22 99万元起。关于具体的落地价,需要考虑以下因素:1 ...浏览全文>>
-
根据您的描述,生活家PHEV 2025款的最低售价为 63 98万元起。如果目前有促销活动或优惠政策,建议尽快咨询...浏览全文>>
-
奔腾T99作为一汽奔腾旗下的旗舰SUV车型,凭借其大气的外观设计、丰富的科技配置以及出色的性能表现,吸引了众...浏览全文>>
-
当然可以!以下是一个简单的试驾预约流程,帮助您轻松开启智蓝G5新能源的试驾之旅:1 确定需求- 车型选择...浏览全文>>
-
特斯拉的赛博越野旅行车(Cybertruck)自发布以来就引发了广泛关注。这款车型结合了皮卡的实用性、SUV的多功能...浏览全文>>
-
江淮悍途EV是一款纯电动皮卡,如果您想预约试驾,通常需要满足以下条件和准备以下信息:1 基本条件 - 年...浏览全文>>
-
截至我所掌握的信息,瑞驰新能源的ED75 2024款具体价格和配置可能会因地区、经销商以及政策补贴的不同而有所...浏览全文>>
-
在考虑购买上汽大众ID 4 X时,了解车辆的价格以及相关的购车费用是非常重要的。以下是一些关键信息和费用明...浏览全文>>
- 山东济南途观L新能源价格大公开,买车不花冤枉钱
- 东莞途岳最新价格2025款全分析,买车不踩坑
- 济南探岳GTE新车报价2024款,换代前的购车良机,不容错过
- 郑州ID.7 VIZZION多少钱 2024款落地价,配置升级,值不值得买?
- 郑州途锐新能源最新价格2024款,优惠购车,最低售价67.98万起
- 瑞虎7 PLUS新车报价2025款,买车前的全方位指南
- 广东东莞揽巡价格走势,市场优惠力度持续加大
- 轩逸新车报价2025款,买车前的全方位指南
- 飞凡R7新车报价2025款,换代前的购车良机,不容错过
- 试驾风光ix5,轻松搞定试驾
- 捷途山海L7预约试驾,从预约到试驾的完美旅程
- 试驾E福顺,从预约到试驾的完美旅程
- 长安星卡EV多少钱?选车指南与落地价全解析
- 凯翼E5 EV多少钱?如何挑选性价比高的车
- 标致408X预约试驾,快速操作,轻松体验驾驶乐趣
- 试驾星际牛魔王,新手必看的操作流程
- 岚图汽车岚图梦想家试驾预约,轻松几步,畅享豪华驾乘
- 影豹多少钱?全方位对比助你选车
- 豪运最新价格2023款,豪华配置超值价来袭
- 缤智多少钱 2025款落地价全解买车必看