时空是一个概念模型,融合了空间的三个维度(长度、宽度和广度)与时间的第四个维度。这样,就创建了一个四维几何对象。研究人员最近使用类似的思维方式来研究人工智能环境,从而以几何术语对人工智能问题进行了独特的重构。
托马斯·伯恩斯博士,博士冲绳科学技术学院(OIST)的研究生和客座研究员,以及西交利物浦大学数学家、OIST前博士后研究员RobertTang博士希望从几何角度研究人工智能系统的角度来更准确地表示其属性。
他们已经确定,“几何缺陷”的发生,即所谓的格罗莫夫链接条件的失败,与移动人工智能体之间可能发生碰撞的位置完全相关。他们的研究结果发表在《机器学习研究汇刊》杂志上。
使用网格世界对现实场景进行建模
网格世界由排列在网格中的方形单元组成,其中单元可以被单个代理(例如考拉)或物体(例如沙滩球)占据或不占据。网格世界中的代理可以通过编程来解决谜题并追求奖励。它们可能在网格中的相邻图块之间移动,研究人员经常研究它们在执行特定目标(例如到达网格世界中的精确位置)时的移动、计划和策略。
网格世界长期以来一直用于人工智能研究,特别是强化学习,它已被用来击败视频游戏和棋盘游戏(如国际象棋和围棋)的世界冠军。它们为潜在的现实应用提供简单但可扩展的模型,例如,安全地协调自动驾驶汽车或仓库机器人的运动。
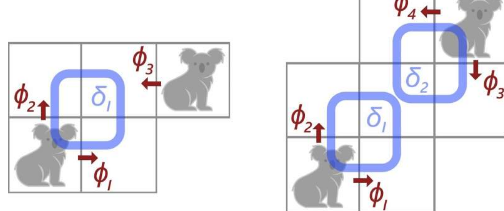
从网格世界中选定的状态(代理和对象的指定排列)开始,允许执行两种操作:移动-让代理移动到相邻的空单元格,以及推/拉-让代理推动或沿直线拉动物体。
当这个过程重复足够多次时,就可以创建一个“状态复合体”。状态复合体将系统的所有可能配置表示为单个几何对象,这意味着我们可以使用几何学(涉及对象的精确形状)、拓扑学(在变形下保留的空间属性,例如弯曲、拉伸、和收缩)和组合学(对象的计数和排列)。
研究人员结合使用纸笔数学和定制的计算机程序来创建和分析本研究中创建的状态复合体。
“这就像一个复古的街机游戏,但你可以添加各种东西,比如门、按钮和敌人,然后考虑任何这些更复杂场景的几何和拓扑,”伯恩斯博士解释道。“你可以直观地把国家复合体想象成一个物理乐高积木,由立方体、正方形和棍子粘在一起,每个代表网格世界的特定重新配置。”
具有两个代理的2×2网格世界的状态复合体。阴影表示连接到周围4个周期的方块。图片来源:使用Gromov的链接条件检测网格世界中的危险,机器学习研究交易(2024)。
碰撞前一刻
当两个特工靠得太近时,他们可能会互相碰撞。事实证明,这种潜在的碰撞表明存在几何缺陷,每次在网格世界中发生这种情况时,都可能发生碰撞。
有趣的是,大多数时候,数学家的目标是证明这样的物体不存在任何几何缺陷。这是因为这些缺陷的缺失赋予了物体理想的数学特性。如果存在哪怕一个几何缺陷,那么整个国家综合体就会失去这些好处。
“最初,我们想表明不存在几何缺陷,但后来我们发现了很多这些小烦恼,我们认为也许它并不那么烦人,也许它与一些重要的事情相关。事实证明,是的,它是相关的伯恩斯博士说:“了解这一关键的安全信息。”
科学家们还证明,当两个智能体被国际象棋中的马棋或两步象棋分开时,状态复合体中就会出现这些几何缺陷。“这些是发生这些缺陷的唯一情况。例如,在现实世界中,机器人可能会在仓库中相互碰撞,或者自动驾驶汽车可能会在十字路口发生碰撞。这不是碰撞点;而是发生碰撞之前的那一刻。碰撞很重要。”
人工智能的实际应用
一般来说,几何缺陷和几何方法可以帮助提高我们对现有人工智能系统的理解。例如,研究人员可以采用经过训练以避免代理之间发生碰撞的人工智能系统,并尝试发现这些几何缺陷所在的位置。这可能有助于科学家更有效地检测人工智能系统中潜在的碰撞,例如机器人和人类频繁互动的辅助生活场景。
“这些发现提供了一种新方法,可以在具有多个智能体的人工智能环境中寻求有保障的安全限制,而且它们不需要是考拉;它们可以是帮助做家务、探索灾区的机器人,或者是提供送货服务的自动驾驶汽车,”伯恩斯博士指出。