柔性压电传感器对于监测人类和人形机器人的运动至关重要。然而,现有的设计要么成本高昂,要么灵敏度有限。
在最近的一项研究中,日本的研究人员通过开发一种新型压电复合材料来解决这些问题,这种复合材料由电纺聚偏氟乙烯纳米纤维与多巴胺结合而成。用这种材料制成的传感器在低成本下表现出显著的性能和稳定性改进,有望在医学、医疗保健和机器人技术领域取得进展。
他们的研究由杰出教授IckSooKim领导,与JunpengXiong、LingWang、MayakrishnanGopiraman和JianShi合作完成,研究成果发表在《先进纤维材料》杂志上。
世界正快速迈向智能时代,这是历史的一个阶段,通过利用人工智能和机器人等技术,自动化和互联互通程度不断提高。传感器是这一转型中有时被忽视的基本要求,是人类、机器及其环境之间的重要接口。
然而,如今机器人变得越来越灵活,可穿戴电子产品也不再局限于科幻小说,传统的硅基传感器在许多应用中不再适用。因此,提供更好舒适度和更高多功能性的柔性传感器已成为一个非常活跃的研究领域。
压电传感器在这方面尤为重要,因为它们可以将机械应力和拉伸转换为电信号。尽管有许多有希望的方法,但仍然缺乏环境可持续的方法来以低成本大规模生产柔性、高性能的压电传感器。
在此背景下,日本信州大学的一个研究小组决定迎接挑战,利用一种成熟的制造技术——静电纺丝来改进柔性压电传感器的设计。
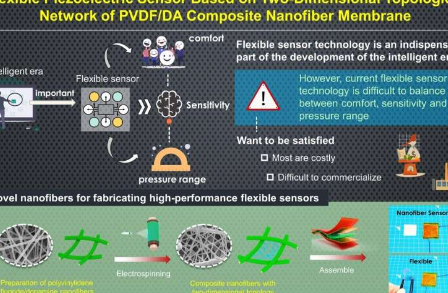
所提出的柔性传感器设计涉及复合二维纳米纤维膜的逐步电纺。首先,纺出直径约为200纳米的聚偏氟乙烯(PVDF)纳米纤维,形成坚固均匀的网络,作为压电传感器的基础。
然后,将直径小于35纳米的超细PVDF纳米纤维纺到预先存在的基底上。这些纤维会自动交织在基底网络的间隙之间,形成特定的二维拓扑结构。
通过实验、模拟和理论分析进行表征后,研究人员发现,所得复合PVDF网络具有增强的β晶体取向。
通过增强这种极性相(这是PVDF材料中观察到的压电效应的原因),传感器的压电性能得到显著改善。为了进一步提高材料的稳定性,研究人员在静电纺丝过程中引入了多巴胺(DA),从而形成了一种保护性的核壳结构。
Kim表示:“采用PVDF/DA复合膜制造的传感器表现出卓越的性能,包括1.5–40N的宽响应范围、对0–4N范围内弱力的7.29V/N的高灵敏度以及出色的操作耐用性。”
这些卓越的品质已在实际应用中得到证实,我们利用可穿戴传感器测量了各种各样的人体运动和动作。更具体地说,当人体佩戴所提出的传感器时,它们可以对自然运动和生理信号产生易于区分的电压响应。这些信号包括手指敲击、膝盖和肘部弯曲、脚踏,甚至说话和手腕脉搏。
鉴于这些压电传感器潜在的低成本大规模生产,加上它们使用环保的有机材料代替有害的无机物,这项研究不仅对健康监测和诊断,而且对机器人技术都具有重要的技术意义。
“尽管目前面临诸多挑战,但人形机器人在不久的将来将发挥越来越重要的作用。例如,著名的特斯拉机器人‘擎天柱’已经可以模仿人类的动作,像人类一样行走,”金补充道。
“考虑到目前正在使用高科技传感器来监测机器人的运动,我们提出的基于纳米纤维的卓越压电传感器不仅在监测人类运动方面具有很大的潜力,而且在人形机器人领域也具有很大的潜力。”
为了使这些传感器更容易被采用,研究团队将专注于提高材料的电输出特性,以便柔性电子元件不需要外部电源就能被驱动。