一种用于连续机器人形状和接触检测的新型系统
自然界中,许多生物都表现出非凡的灵活性,例如拥有灵活触手的章鱼或拥有象鼻的大象。受这些自然结构的启发,研究人员致力于开发高度灵活的连续机器人,以提供稳健性和安全性。
理想情况下,连续机器人的特点是具有许多自由度 (DOF) 和关节数量,超过大多数任务所需的数量。这些特性使它们能够动态调整和修改其形状,从而能够避开障碍物和意外情况。然而,它们的复杂运动使得很难表征它们的形状和运动。
传统的分析技术用于解决连续机器人的运动学和动力学问题,依赖于复杂的建模,这会增加计算成本。或者,可以使用内置于连续机器人中的柔性传感器来跟踪其形状和运动,但这种方法需要许多低分辨率的传感器,使系统变得笨重。
更有前景的解决方案是在连续机器人末端采用单个传感模块。然而,此前该方向的研究主要集中在机器人的姿势上,并没有解决接触检测问题。
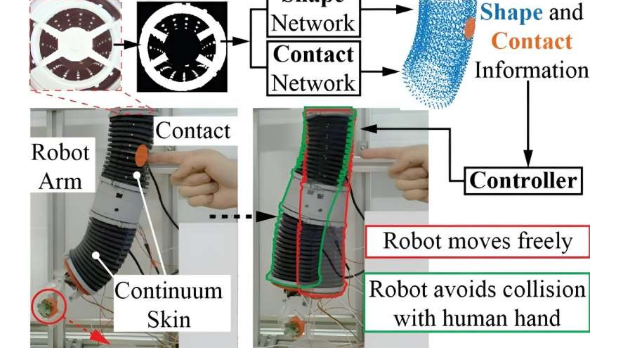
为了解决这一问题,由日本高等科学技术研究院 (JAIST) 副教授 Van Anh Ho 领导的日本研究团队开发了一款名为 ConTac 的新系统。该系统可以估算机械臂的形状和与柔软皮肤的接触。
何博士解释说:“该系统的最终目标是在连续机器人中实现,但在本研究中,我们重点关注使用铰接式机械臂和柔软皮肤进行验证的感知。”
该团队包括来自 JAIST 的博士生 Tuan Tai Nguyen 和 Quan Khanh Luu,以及来自河内 VNU-UET 大学的 Dinh Quang Nguyen 博士。他们的研究成果于 7 月 15 日至 19 日在荷兰代尔夫特举行的机器人:科学与系统 ( RSS 2024 ) 会议上发表。
图 2. ConTac 传感框架。图片说明:我们使用模拟环境收集训练数据,用于开发传感模型。配备传感系统的机器人有望用于人机交互应用。图片来源:JAIST 的 Van Anh Ho
ConTac 系统由一个模拟连续机器人弯曲的骨架、带有标记的软皮肤、一个用于观察皮肤变形的摄像头、皮肤形状和接触感应模型以及接触感知控制机制组成。该系统可应用于任何 ConTac 单元或任何其他具有相同机制和形式的机器人,无需任何校准。
ConTac 装置是一种组装的连续模拟机器人手臂,具有脊柱和柔软的皮肤。研究人员还为该系统开发了一种基于导纳的控制器,该控制器使用感知信息来引导机器人手臂的运动。此外,ConTac 装置具有成本效益,可以用传统材料制造
该创新系统采用两种深度学习模型,用于软连续皮肤的形状重建和接触检测。这些模型完全使用模拟图像进行训练,然后直接适应真实机器人,无需微调,节省时间和资源。该系统的可转移性在两个不同的 ConTac 单元上进行了测试,它们的表现相似,无需任何额外调整。
何博士强调了这项研究的重要性,他表示:“ConTac 系统旨在用于各种机器人系统,而无需进行复杂的调整。配备我们系统的柔性机械臂非常适合智能农业和医疗保健服务,因为这些领域的机器人必须在存在许多障碍的环境中导航,并与人类安全互动。
“它们的柔软性和灵活性,加上感知周围环境的能力,使它们非常适合与植物和患者互动。”
该框架中使用的传感和控制原理可以产生新的触觉传感器,这些传感器可以连接到任何现有的机器人系统,在不改变机器人原始设计的情况下为安全的人机交互提供新的传感和控制范例。
何博士总结道:“想象一下,在一个社会里,每个机器人和机器都拥有触觉。这种转变将彻底改变行业和日常生活。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
截至2024年,大众探岳GTE的售价可能会因地区、配置和促销活动而有所不同。一般来说,2024款探岳GTE的价格可能...浏览全文>>
-
关于2025款途观L的价格信息,目前还没有官方发布。不过,根据以往的市场规律和车型更新周期,我们可以大致推测...浏览全文>>
-
根据您提供的信息,2024款广东东莞威然的最低售价为22 99万元起。关于具体的落地价,需要考虑以下因素:1 ...浏览全文>>
-
根据您的描述,生活家PHEV 2025款的最低售价为 63 98万元起。如果目前有促销活动或优惠政策,建议尽快咨询...浏览全文>>
-
奔腾T99作为一汽奔腾旗下的旗舰SUV车型,凭借其大气的外观设计、丰富的科技配置以及出色的性能表现,吸引了众...浏览全文>>
-
当然可以!以下是一个简单的试驾预约流程,帮助您轻松开启智蓝G5新能源的试驾之旅:1 确定需求- 车型选择...浏览全文>>
-
特斯拉的赛博越野旅行车(Cybertruck)自发布以来就引发了广泛关注。这款车型结合了皮卡的实用性、SUV的多功能...浏览全文>>
-
江淮悍途EV是一款纯电动皮卡,如果您想预约试驾,通常需要满足以下条件和准备以下信息:1 基本条件 - 年...浏览全文>>
-
截至我所掌握的信息,瑞驰新能源的ED75 2024款具体价格和配置可能会因地区、经销商以及政策补贴的不同而有所...浏览全文>>
-
在考虑购买上汽大众ID 4 X时,了解车辆的价格以及相关的购车费用是非常重要的。以下是一些关键信息和费用明...浏览全文>>
- 山东济南途观L新能源价格大公开,买车不花冤枉钱
- 东莞途岳最新价格2025款全分析,买车不踩坑
- 济南探岳GTE新车报价2024款,换代前的购车良机,不容错过
- 郑州ID.7 VIZZION多少钱 2024款落地价,配置升级,值不值得买?
- 郑州途锐新能源最新价格2024款,优惠购车,最低售价67.98万起
- 瑞虎7 PLUS新车报价2025款,买车前的全方位指南
- 广东东莞揽巡价格走势,市场优惠力度持续加大
- 轩逸新车报价2025款,买车前的全方位指南
- 飞凡R7新车报价2025款,换代前的购车良机,不容错过
- 试驾风光ix5,轻松搞定试驾
- 捷途山海L7预约试驾,从预约到试驾的完美旅程
- 试驾E福顺,从预约到试驾的完美旅程
- 长安星卡EV多少钱?选车指南与落地价全解析
- 凯翼E5 EV多少钱?如何挑选性价比高的车
- 标致408X预约试驾,快速操作,轻松体验驾驶乐趣
- 试驾星际牛魔王,新手必看的操作流程
- 岚图汽车岚图梦想家试驾预约,轻松几步,畅享豪华驾乘
- 影豹多少钱?全方位对比助你选车
- 豪运最新价格2023款,豪华配置超值价来袭
- 缤智多少钱 2025款落地价全解买车必看